Duration: 24 months
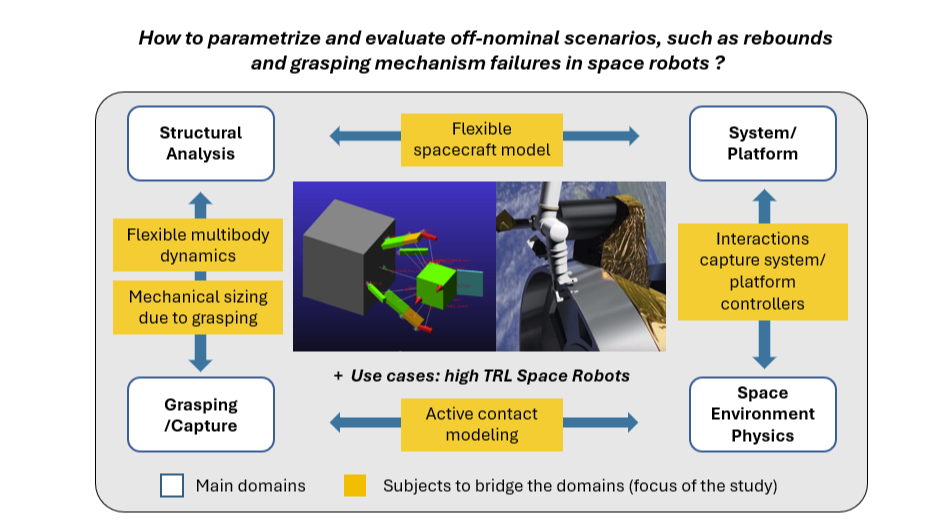
Autonomous space manipulators are crucial for active debris removal (ADR) and in-orbit servicing (IOS) missions. Their development relies heavily on accurate models and simulation tools, given the difficulties of carrying out experiments in space. State-of-the-art models describe nominal scenarios using multibody dynamics (ODEs and/or DAEs) validated by robustness analysis, including friction sensitivity, motor uncertainties, and control stability (e.g., Monte Carlo simulations). However, methods for evaluating off-nominal scenarios, such as irregular debris shapes, unexpected rebounds, and sensor failures, are missing in the literature. Unknown composite dynamics include uncertainties in contact (stiffness, friction), structural flexibilities, MCI (Mass, Centre of Gravity and Inertia) properties, and control of platform-robot interactions. These issues can cause rebounds, oscillations, and poor controller performance, complicating missions with uncooperative or passive targets. To address this gap, this study will develop an innovative approach for modelling flexibilities, contact dynamics, grasping/capturing, and control design within a metamodel framework. It will be developed through component simplifications, trade-offs, and complexity quantification in a tree-like structure. It will predict deviations from nominal scenarios and offer new insights into how the chaser/stack MCI uncertainties affect platform control during and after capture. This approach includes analysing complex dynamics like target-chaser interactions, robotic arms, and contact bouncing to de-risk missions with uncooperative targets. To validate the models' performance, dynamic parameters such as contact forces and kinematics will be integrated into the new framework and correlated with models of high TRL docking interfaces and robots from CSEM and ClearSpace. Finally, robust control design and analysis such as H-infinity and mu analysis will assess stability and robustness at the GNC level.