Fast Steering Mirrors (FSMs) are essential for beam steering and stabilization in space optical communication, free-space optics, line-of-sight stabilization, and high-precision optical systems.
Current FSM designs rely on three or more individual actuators for achieving two or three degrees of freedom (DOFs) of the mirror — namely tip, tilt, and, optionally, piston. Most designs employ four actuators in a push-pull configuration. This approach necessitates complex assembly and precise alignment, driving up manufacturing costs and limiting scalability.
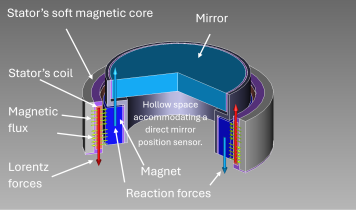
This activity introduces an innovative distributed actuation concept that eliminates the need for multiple discrete actuators. By applying forces along a circumferential path and independently controlling predefined regions, this approach simplifies implementation, enhances flexibility, and facilitates performance optimization.
Unlike conventional FSMs, this design leverages a highly integrated actuation structure, reducing part count and mechanical complexity while improving scalability, thermal management, and manufacturing repeatability. Optimized force generation and distribution enable precise multi-degree-of-freedom (DOF) control, with potential advantages in bandwidth, stability, and power efficiency.
This innovation aligns with the emerging market demands for cost-effective, high-performance FSMs, particularly in satellite communication terminals, free-space optical networks, and line of sight imaging systems. With a patent-pending status, this approach is expected to significantly lower manufacturing costs while surpassing state-of-the-art performance.