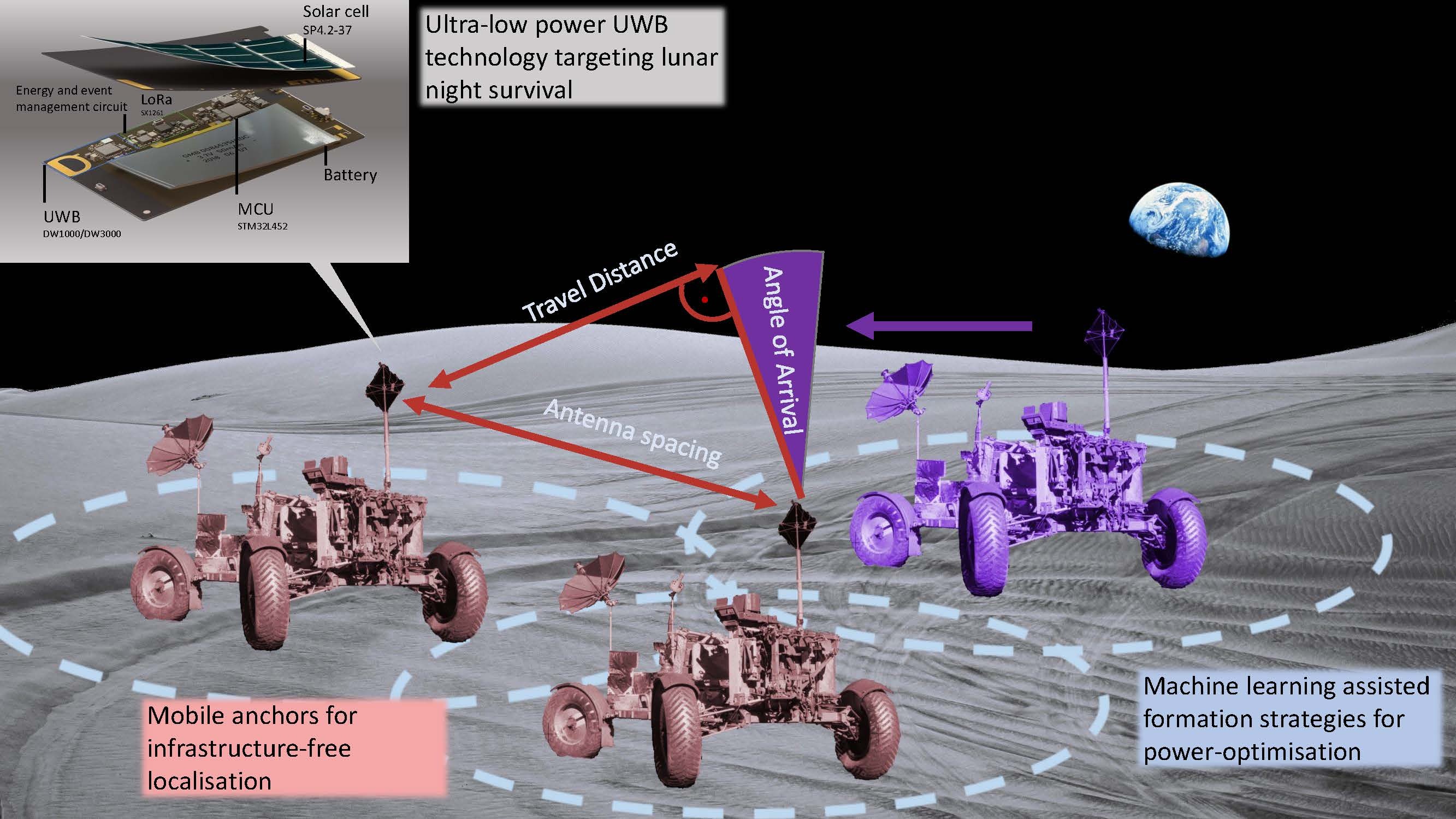
The availability of affordable Ultra-Wideband (UWB) technology and emerging commercial low-power UWB radio modules has triggered a renewed interest in UWB technology for a rapidly growing number of applications. Novel UWB radios have even the capability of performing angle of arrival and angle of departure calculations combined with accurate precision of the distance. This can open a wide range of applications in space where GNSS cannot be used. UWB is working in a similar way to GNSS exploiting fixed positions (anchors) to create an infrastructure. On the other hand, with the advance of technology, those anchors can be mobile, inexpensive, and deployed in a plug-and-play manner if they are carefully designed. Moreover in space applications where there is an existing infrastructure is important to guarantee the capability to set up it in a plug-and-play manner. To achieve this goal there are still some challenges to be addressed: 1) The UWB tags that will be acting as points are energy efficient and better self-sustaining, moreover, they offer a self-calibration capability. 2) The mobile robots-vehicles adopt adaptive and embedded algorithms to allow self-calibration and accurate positioning in these unknown areas. 3) the UWB tag and the robots can be found by each other by exploiting event-based mechanisms such as waking up the radio to improve the efficiency and effectiveness of the localization system.
This project aims to overcome these challenges to achieve a new generation of energy-efficient and mobile embedded systems for accurate GPS-free localization and position exploited by robots and vehicles. The project will investigate the possibility to achieve self-calibrate and self-sustaining UWB anchors by exploiting energy-efficient algorithms on low-power CPU, UWB wake-up radio, low-power techniques, and energy harvesting to enable tags to form the infrastructure of the positioning system so they can be deployed during the missions.