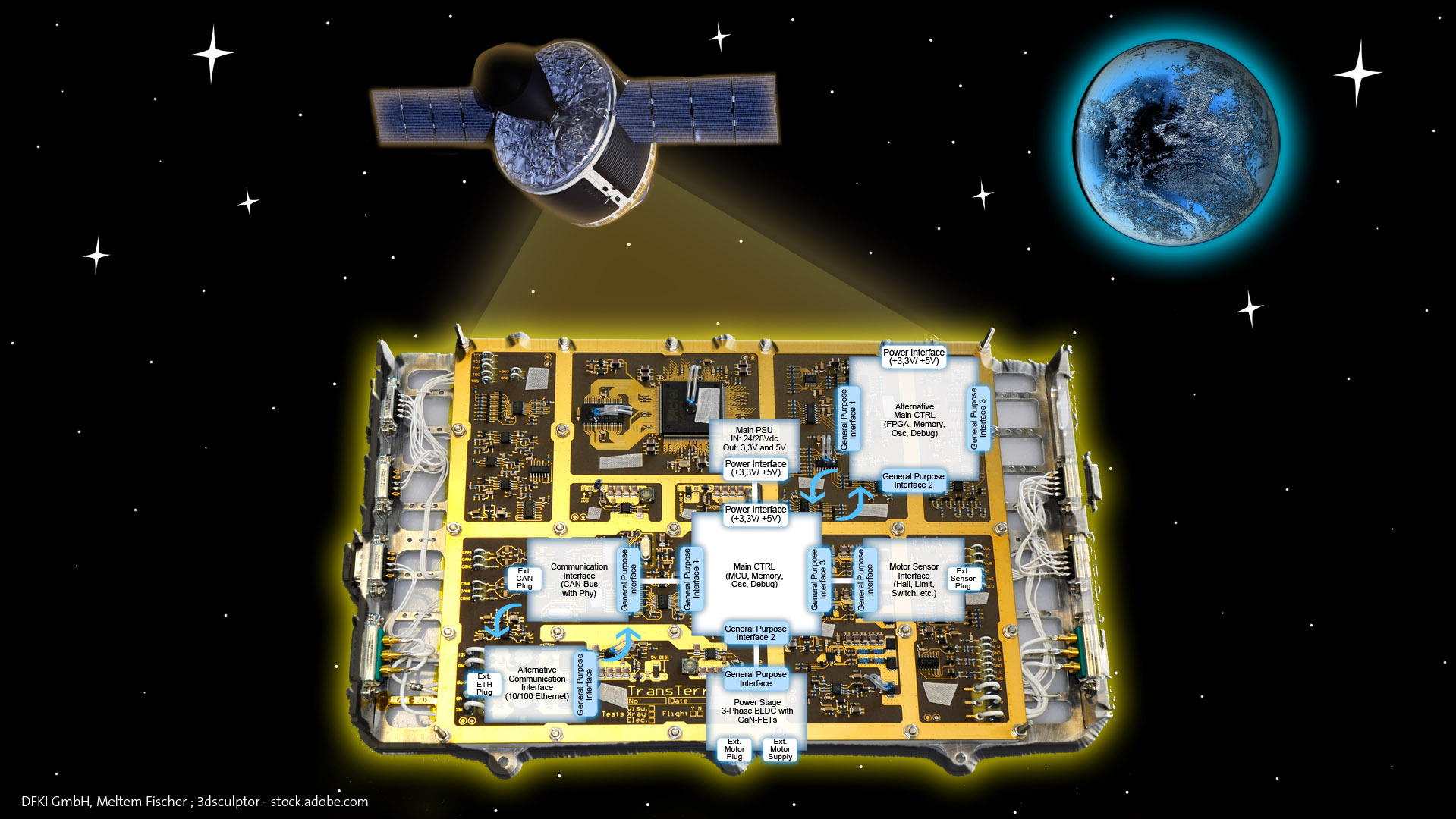
From today's perspective, a modular design of commercial computers is indispensable. This allows the simple assembly and exchange of components such as a CPU, GPU, power supply, and storage media. Considering the space domain, the development of CubeSats has shown the massive advantages of modularity and usage of COTS components to reduce the overall development cost. In the long run it is desirable to reuse these concepts in a broader range of space applications. The objective of this project is to demonstrate a modular breadboard multi-PCB design using COTS components for space applications. The concrete demonstrator will be a COTS GaN-FET power stage of a robotic actuator. The functionality will be distributed over multiple PCBs (Processing PCB, Sensor / Interfaces PCB, Power stage PCB, etc.). The PCBs are connected via consistent interfaces, to allow Plug-and-Play reconfiguration during development phase. E.g., this eases the testing of different processors (FPGA vs MCU) or sensors by just replacing the according module. Furthermore, our approach enables sub-module qualification. In comparison to insufficient black box testing of monolithic PCB designs versus extensive part level qualification, this provides a satisfactory compromise in the R&D domain. We are expecting from our approach to gain savings in volume and mass by approximately factor 1.5. The resulting smaller sectional size is ideal for CubeSat application, e.g. for qualification. In addition, the modular design reduces the risks during manufacturing and commissioning. Apart from the proposed hardware design, we are planning to develop software as well to demonstrate the capabilities of the power stage. The goal is to provide a software design which is on a higher level in line with ECSS-M-ST-40 (and similar standards like DO178-C) and on code level in line with e.g. MISRA-C. We keep the effort for this early demonstration manageable by skipping detailed validation and verification measures.