Duration: 5 months
Given the growing population of inactive satellites in near-Earth space, Space Manipulator Systems (SMS) promise flexible solution for in-orbit servicing (IOS) missions, but demand highly reliable autonomy during close-proximity operations. Building on a previously validated navigation stack that uses two cameras, mounted on the base spacecraft and on the manipulator end-effector respectively, to form a variable-baseline stereo measurement system, this activity reorients the research effort toward the design of motion planners and guidance policies that actively exploit the peculiarities and strengths of such sensing/estimation architecture.
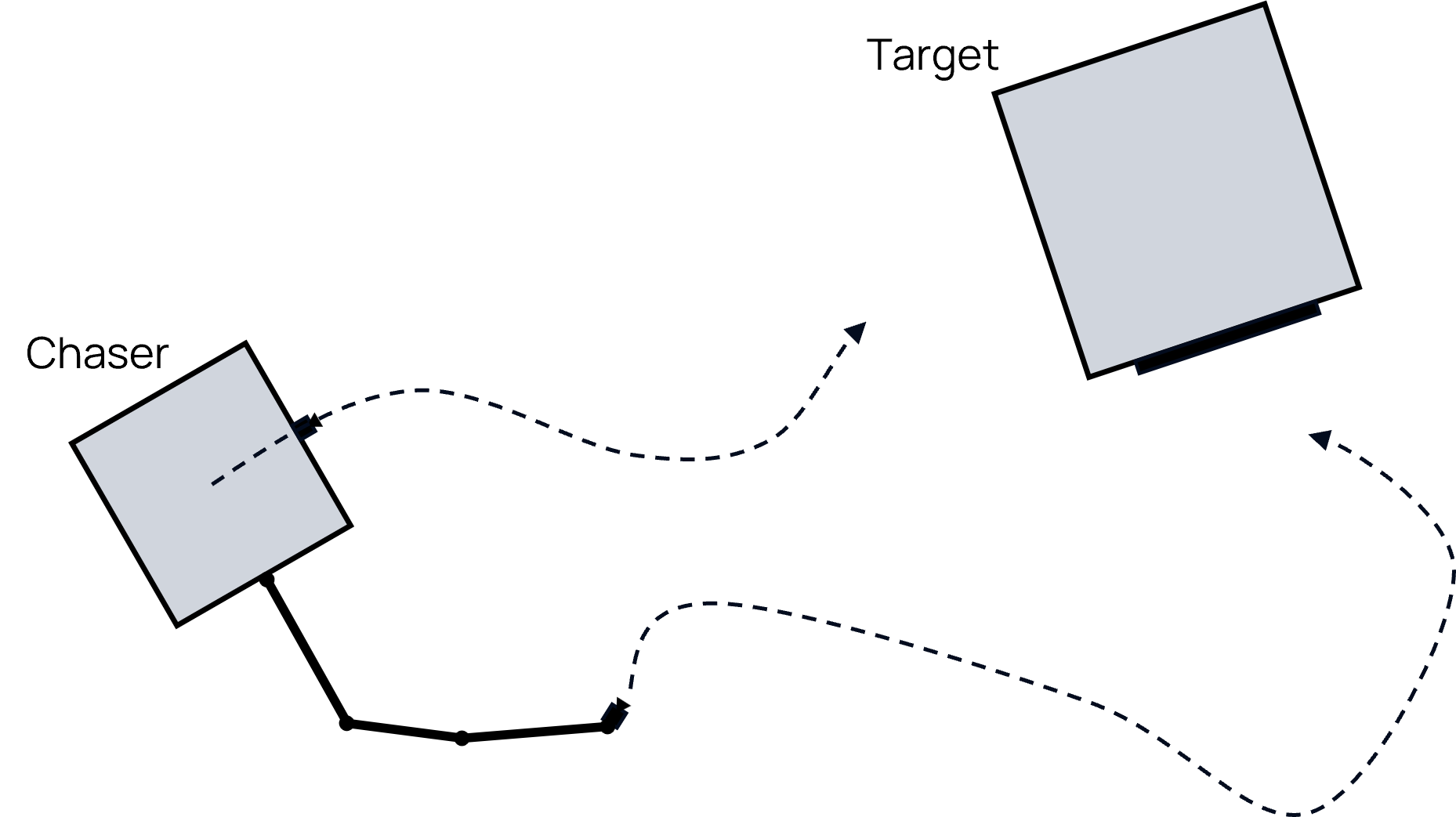
We will investigate a novel guidance framework for approach and capture that generates combined trajectories and control policies for both the base of the chasing spacecraft and the manipulator. Such trajectories will (i) maximize target observability by the paired cameras throughout the approach, (ii) obey manipulator kinematics, spacecraft dynamics, and actuation limits, and (iii) maintain safety (collision avoidance). Guidance is cast as a receding-horizon optimal control problem whose cost blends conventional objectives (time, fuel, smoothness) with estimation-centric terms computed from the USQUE measurement model and variable-baseline geometry (e.g., predicted covariance, Fisher information).
The verification plan will rely both on high-fidelity closed-loop simulation using the PROX-SIMA simulator developed by the author and laboratory hardware-in-the-loop tests to quantify gains in estimation accuracy, approach safety, propellant efficiency and robustness to system uncertainties. By tightly coupling guidance to the validated navigation layer, the proposed methods aim to improve autonomy, reliability, and mission success for SMS-based servicing during the critical close-proximity phase.