Duration: 36 months
On an orbit around earth, spacecraft regularly require reorientation to maintain communication, maximize solar panel exposure, protect instruments, or optimise observations. These manoeuvres are governed by attitude guidance and control algorithms, and for most missions, traditional controllers, such as proportional-integral-derivative controllers, suffice. However, several factors may make these manoeuvres too complicated for such methods to remain effective. Missions such as Swift, GLAST, SDO, and the upcoming THESEUS mission require high slew rates and aggressive manoeuvres. Additional challenges include coupled attitude axes, flexible mode interactions, optimality, and constraint satisfaction. Large spacecraft structures may require more advanced actuators than standard reaction wheels, such as Variable Speed Control Moment Gyroscopes, which in comparison remain largely under-explored. All aforementioned challenges cause strong nonlinear effects which can become intractable with low computational resources. How can existing Guidance and Control architectures be adapted to meet high slew rates requirements in nonlinear dynamics and propose more autonomy?
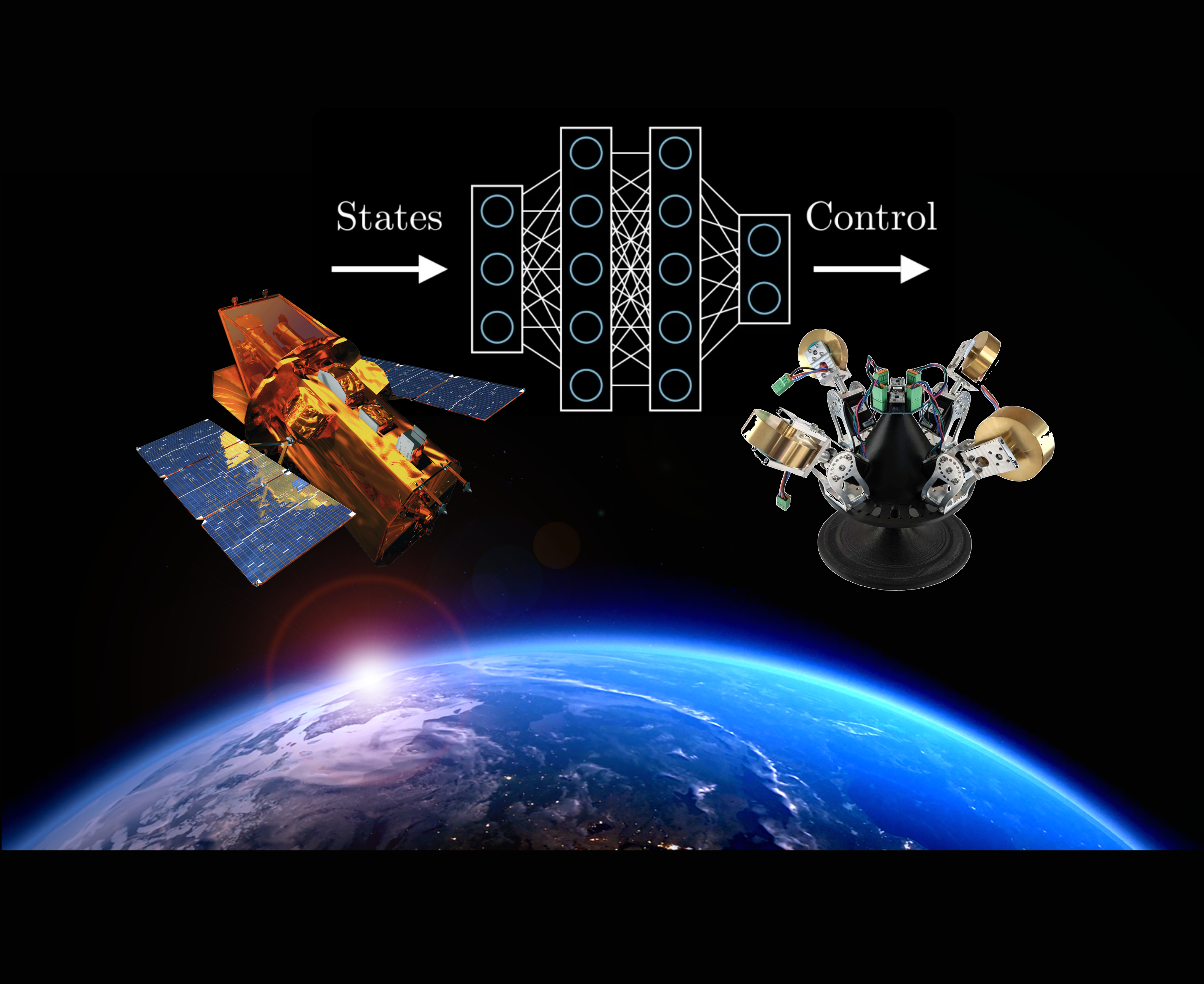
In light of future missions with stringent attitude and agility performance requirements, this research will develop neurocontrollers as practical solutions in cases where traditional methods fall short. Recent advances in machine learning show that neurocontrollers can handle nonlinear dynamics, embed optimality, and operate at low computational cost. Their effectiveness in interplanetary transfers, asteroid landings, and drone racing makes them a promising choice for attitude control.
These controllers will be benchmarked against established Attitude and Orbit Control Systems in simulations and hardware-in-the-loop experiments at the Attitude Control Air Bearing Facility (ESA-ESTEC). Thus, this work will demonstrate their reliability and boost trust in the fidelity of neural-based controllers for future missions.