Duration: 42 months
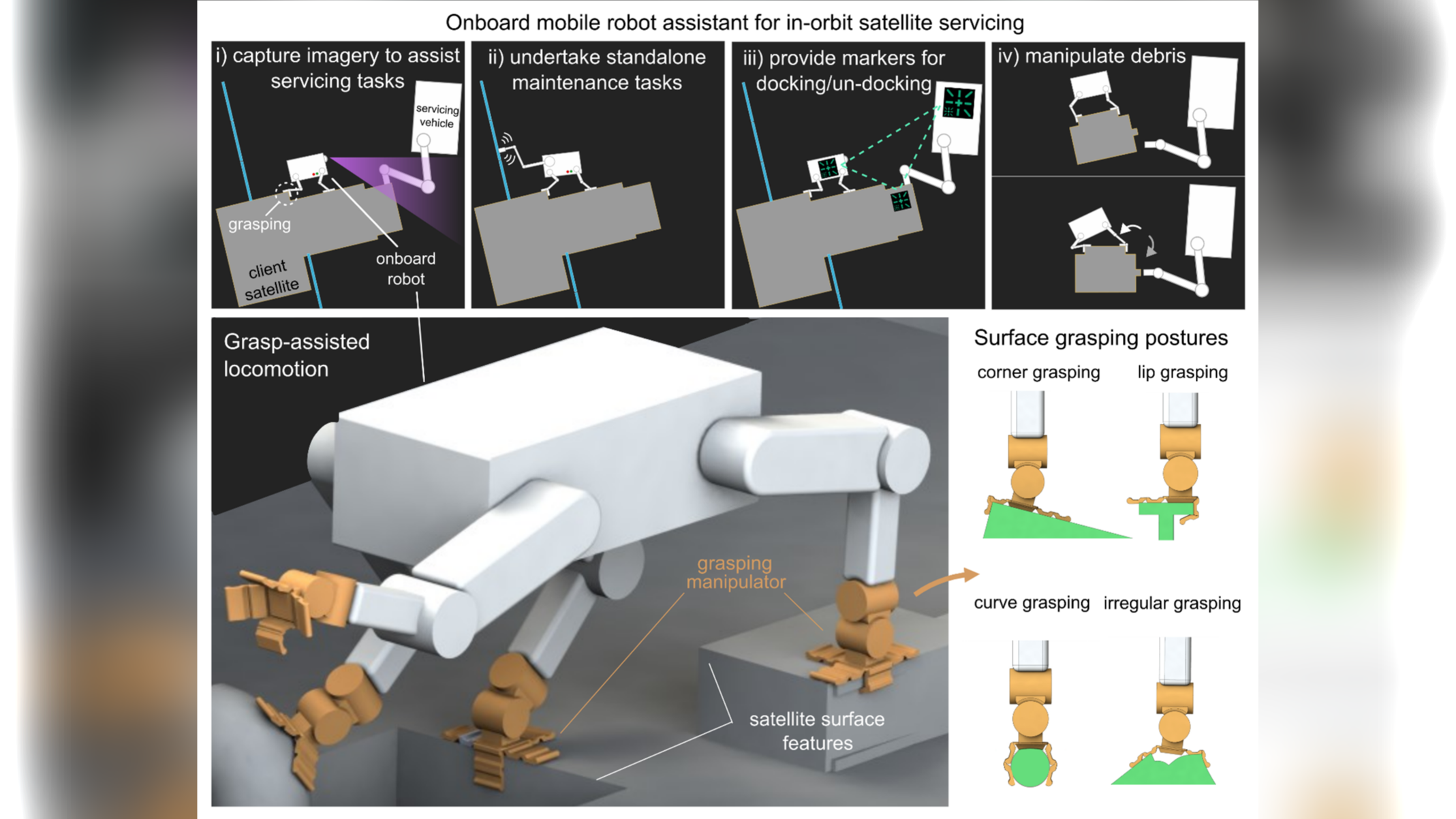
This activity aims to explore advanced grasping locomotion techniques for the in-orbit servicing and inspection of large space structures, such as satellites and space stations. As the complexity and size of these structures increase, so does the need for effective maintenance and inspection methods to ensure their longevity and operational efficiency. This study will investigate the integration of robotic systems equipped with adaptive grasping mechanisms and advanced locomotion strategies, enabling them to navigate and interact with complex geometries in microgravity environments.
The project will focus on the development a set of robotic prototypes capable of both climbing and manipulating large-scale space assets using a combination of novel gripper designs and locomotion algorithms. Through simulation and controlled experiments, we aim to assess the performance of these systems in tasks such as structural inspections, debris removal, and repairs. Additionally, we will evaluate the potential for autonomous operation, leveraging machine learning techniques for real-time decision-making and adaptability to unforeseen challenges in space.
The outcomes of this research are expected to significantly enhance the capabilities of space servicing missions, reducing reliance on human intervention and increasing mission safety and efficiency. By addressing the unique challenges posed by the space environment, this proposal seeks to contribute to the development of robust solutions for the sustainable management of space infrastructure.