Objective
We aim to bridge the current domain gap in visual-based deep learning solution in space activities by:
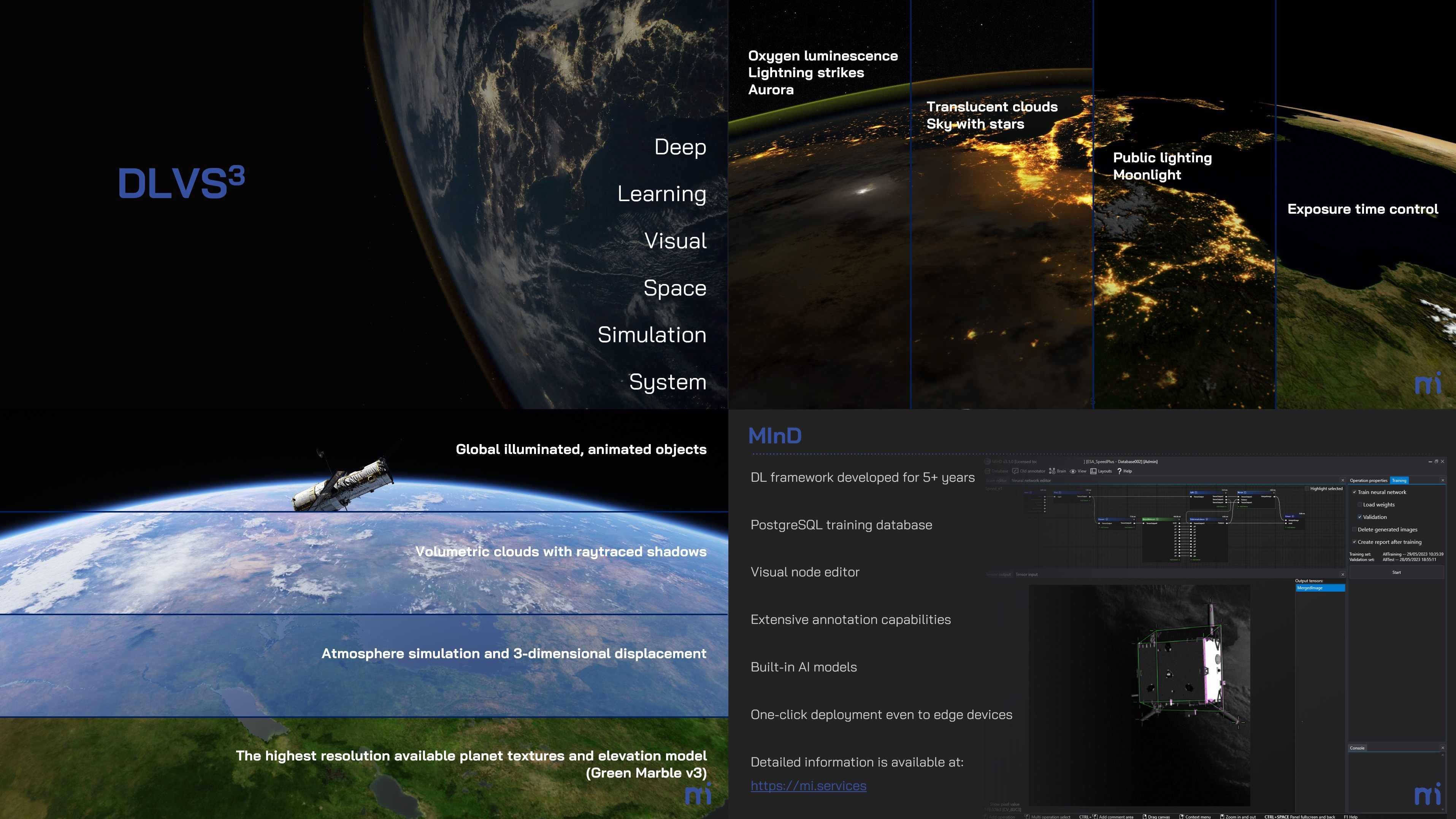
- Generating high-fidelity Synthetic Data Leveraging state-of-the-art path-tracing and real-time 3D tools to create photorealistic synthetic data sets. This data will closely mirror real-world space environments, substantially improving the training and performance of deep learning models used in space applications.
- Establishing a robust Simulation Testbed Introducing a versatile, real-time simulation environment integrated with an n-body simulation and a comprehensive software API. This testbed will enable the formulation and safe testing of various space activity scenarios, allowing for risk-free evaluation and refinement of visual-based deep learning models.
- Innovating 6-Degrees-of-Freedom Pose Estimation Advancing current 6DoF pose estimation techniques by incorporating more robust keypoint detection, probabilistic Perspective-n-Point (PnP) solving, and solution deployment on space-grade edge devices like AMD Versal AI Edge. This innovation aims to improve automatic visual navigation in next-generation satellites, enhancing autonomous proximity operations' safety, efficiency, and success.
Our goal is to address and overcome the challenges of domain-specific training limitations and push the boundaries of what is achievable in autonomous space missions, aligning closely with ESA's vision of advancing space technology and exploration.
Contract number
4000144828
Programme
OSIP Idea Id
I-2023-10551
Related OSIP Campaign
Open Discovery Ideas Channel
Main application area
Exploration
Budget
164200€