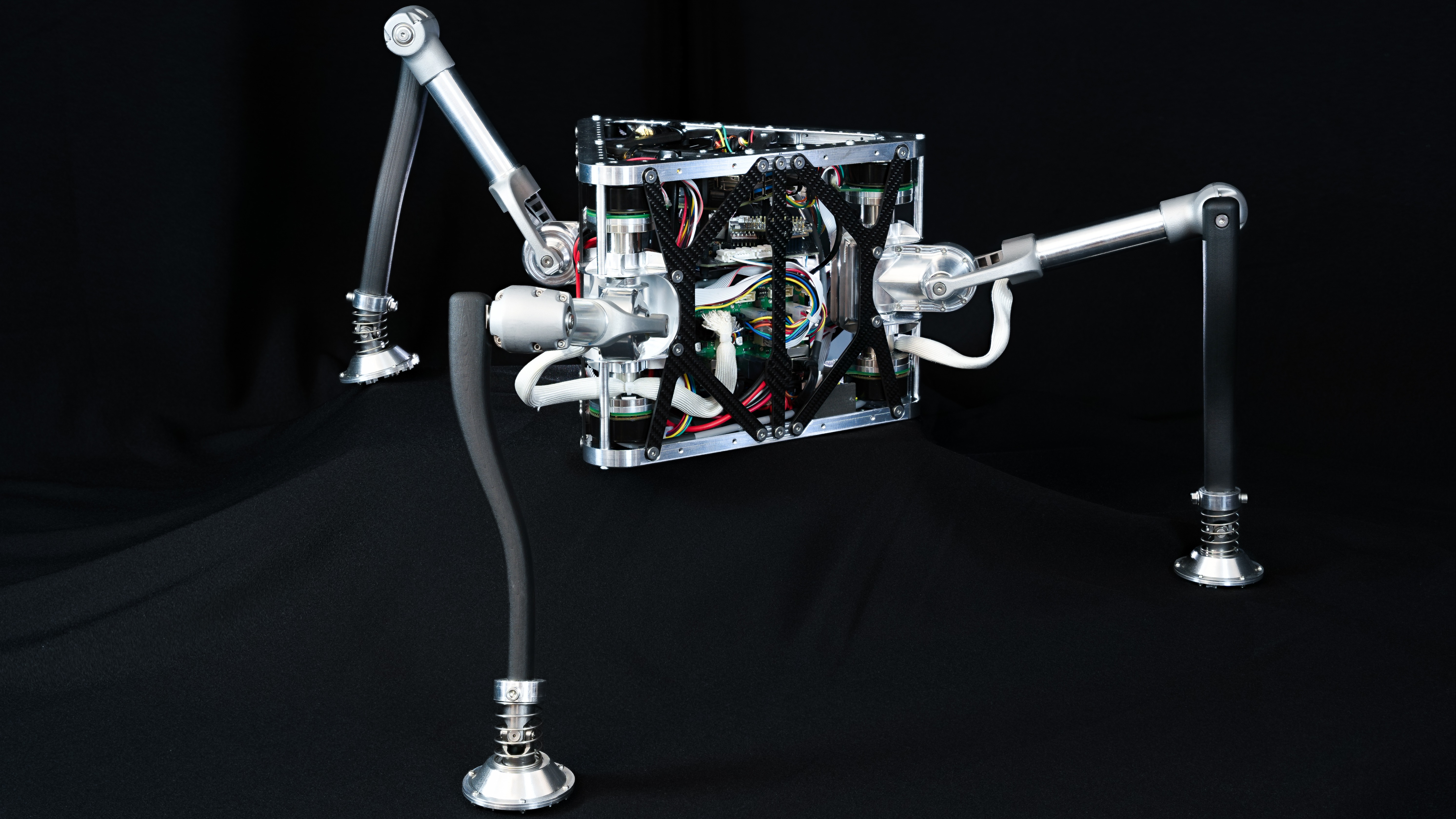
Advancements in legged robotics allow us to explore asteroids and moons in entirely new ways. We harnessed the synergies between cube-sat design and legged robotics to create SpaceHopper, a three-legged, small-scale robot for mobile exploration of low-gravity celestial bodies. With its weight of 5.2 kg and a nominal width of 35 cm, it can fit cube-sat-standards and, at the same time, overcome significant locomotion problems on moons and asteroids. Past asteroid landers, such as MASCOT [1], were not designed for controlled locomotion.
SpaceHopper uses highly dynamic jumping locomotion to traverse the surface. By controlling the attitude of the body after a jump, the legs can absorb the landing impact, which minimizes further uncontrolled bouncing. Formerly, attitude control in low gravity has mainly relied on reaction wheels. However, to save weight and eliminate the risk of an additional subsystem failing, SpaceHopper can achieve complete attitude control using the legs only. We tested the jumping and reorientation capability in a gravity offload test stand on the earth. The test stand allows for rapid testing but is limited in representing low gravity since it only offloads the weight of the main body.
In this project, we want to further advance the technology readiness level of legged locomotion for space. To reach this goal, we want to validate the performance of SpaceHopper in a parabolic flight. We aim to validate SpaceHoppers' reorientation and jumping capability in microgravity without the restrictions of a gravity offload test stand. In preparation for these tests, we will have to completely redesign some of the robots' systems and make others more reliable. For this, we need additional funding. Successful completion of the parabolic flight campaign is a significant milestone in SpaceHopper's development. It will be the first time a legged hopping robot will be demonstrated at this technology readiness level, advancing the whole field.
________
The project in the news:
- Hüpfender Roboter soll Asteroiden erforschen, ORF, https://science.orf.at/stories/3224546
- Meet the team: https://www.esa.int/Education/ESA_Academy_Experiments_programme/Meet_th…;
- ESA Academy Experiments, https://www.spacehopper.ethz.ch/petri.html
________
References:
- [1] T.-M. Ho, V. Baturkin, C. Grimm, J. T. Grundmann, C. Hobbie, E. Ksenik, C. Lange, K. Sasaki, M. Schlotterer, M. Talapina et al., “Mascot—the mobile asteroid surface scout onboard the hayabusa2 mission,” Space Science Reviews, vol. 208, no. 1, pp. 339–374, 2017.
- [2] N. Rudin, H. Kolvenbach, V. Tsounis, and M. Hutter, “Cat-like jumping and landing of legged robots in low-gravity using deep reinforcement learning,” CoRR, vol. abs/2106.09357, 2021.
- [3] W. Zhao, J. P. Queralta, and T. Westerlund, “Sim-to-real transfer in deep reinforcement learning for robotics: a survey,” CoRR, vol. abs/2009.13303, 2020.
- [4] J. Delaune, D. S. Bayard, and R. Brockers, “xvio: A range-visual-inertial odometry framework,” CoRR, vol. abs/2010.06677, 2020.
- [5] P. Arm, R. Zenkl, P. Barton, L. Beglinger, A. Dietsche, L. Ferrazzini, E. Hampp, J. Hinder, C. Huber, D. Schaufelberger, F. Schmitt, B. Sun, B. Stolz, H. Kolvenbach, and M. Hutter, “Spacebok: A dynamic legged robot for space exploration,” in 2019 International Conference on Robotics and Automation (ICRA), 2019, pp. 6288–6294.
- [6] H. Kolvenbach, E. Hampp, P. Barton, R. Zenkl, and M. Hutter, “Towards jumping locomotion for quadruped robots on the moon,” in 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2019, pp. 5459–5466.
- [7] H. Kolvenbach, P. Arm, E. Hampp, A. Dietsche, V. Bickel, B. Sun, C. Meyer, and M. Hutter, “Traversing steep and granular martian analog slopes with a dynamic quadrupedal robot,” CoRR, vol. abs/2106.01974, 2021.
- [8] P. Arm, G. Waibel, G. Ligeza, V. Bickel, M. Tranzatto, S. Zimmermann, T. Homberger, L. Horvath, H. Umbers, F. Kehl, H. Kolvenbach, and M. Hutter, “Glimpse - results and learnings from the first field trial of the esa-esric space resources challenge,” 06 2022.