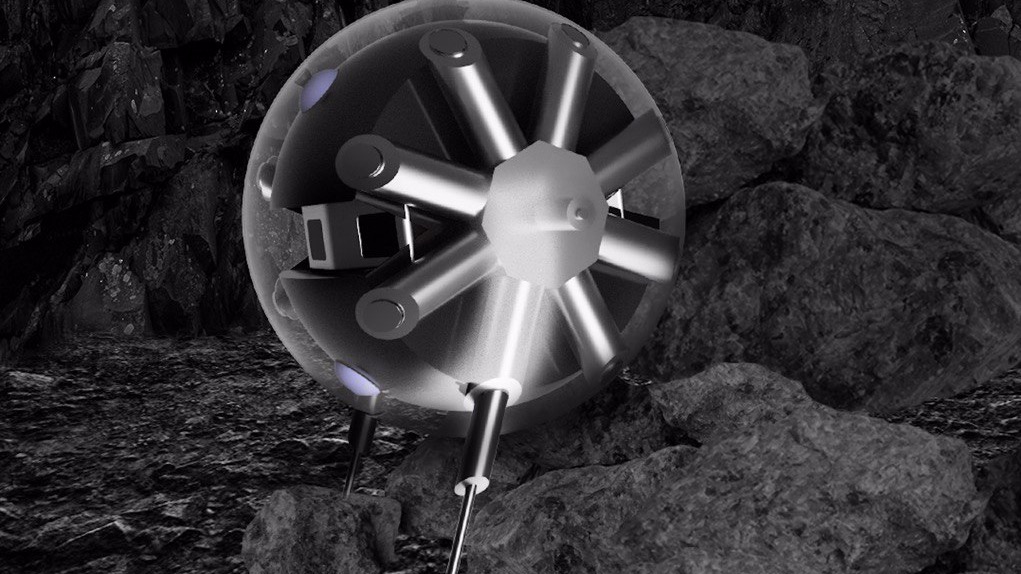
The usage of robots enables a risk-free exploration of unknown and potentially harsh environments such as planetary surface- or subsurface structures. However, rough terrains impose high demands on robots, especially on their locomotion system. The PhD student will work on a novel locomotion approach for spherical robots that initiate rotation using multiple telescopic linear actuators (TLA). The major advantage of spherical robots with TLA's is the flexibility of their locomotion in unknown, possibly hazardous terrains. In particular, the TLA's add versatility to the systems locomotion whereas a robust trans outer shell protects payloads such as internal sensors in any environment. The background to this kind of robot is the DAEDALUS project[1], which proposed a spherical robot for lunar subsurface exploration. It was part of the 2020 SysNova study and the Concurrent Design Facility (CDF) later [2], which showed the basic feasibility of spherical robots for lunar exploration. The PhD student will investigate the locomotion of such a spherical robot that is specifically targeted at the challenges posed by the harsh lunar environment. This demands a never-seen-before control strategy. The basic concept is to reduce the multiple-actuator problem into a model with only two parameters, which makes the system controllable in a more convenient way. This control-model is called Virtual Pose Instruction Plane (VPIP), where a virtual plane describes the position of each TLA. The two parameters mentioned above denote the two angles that fully define the plane. Taking this idea a step further by incorporating the actual surroundings into the plane, known by sensor measurements from cameras or laser scanners, leads to a refined version of VPIP: The Virtual Pose Instruction Map (VPIM). Not only does this enable the robot to maneuver through the terrain, but use the particularities of the environment for active locomotion, as it has never been seen before for exploration robots.