Teleoperation enables humans to interact with robots in hazardous settings, such as during space maneuvers. The operators of remote objects must have a double situational awareness: of the place where he/she operates the robot and of the environment where the robot is operating.
The human body orientation and vestibular cues modulate auditory and visual performance. The conflict between vestibular and visual inputs (encoded in different frames of reference) can cause spatial disorientation, which in turn affects visual behavior, selective attention, and working memory. Therefore, we hypothesize that the orientation and movement of a teleoperator would impact the performance of the operation.
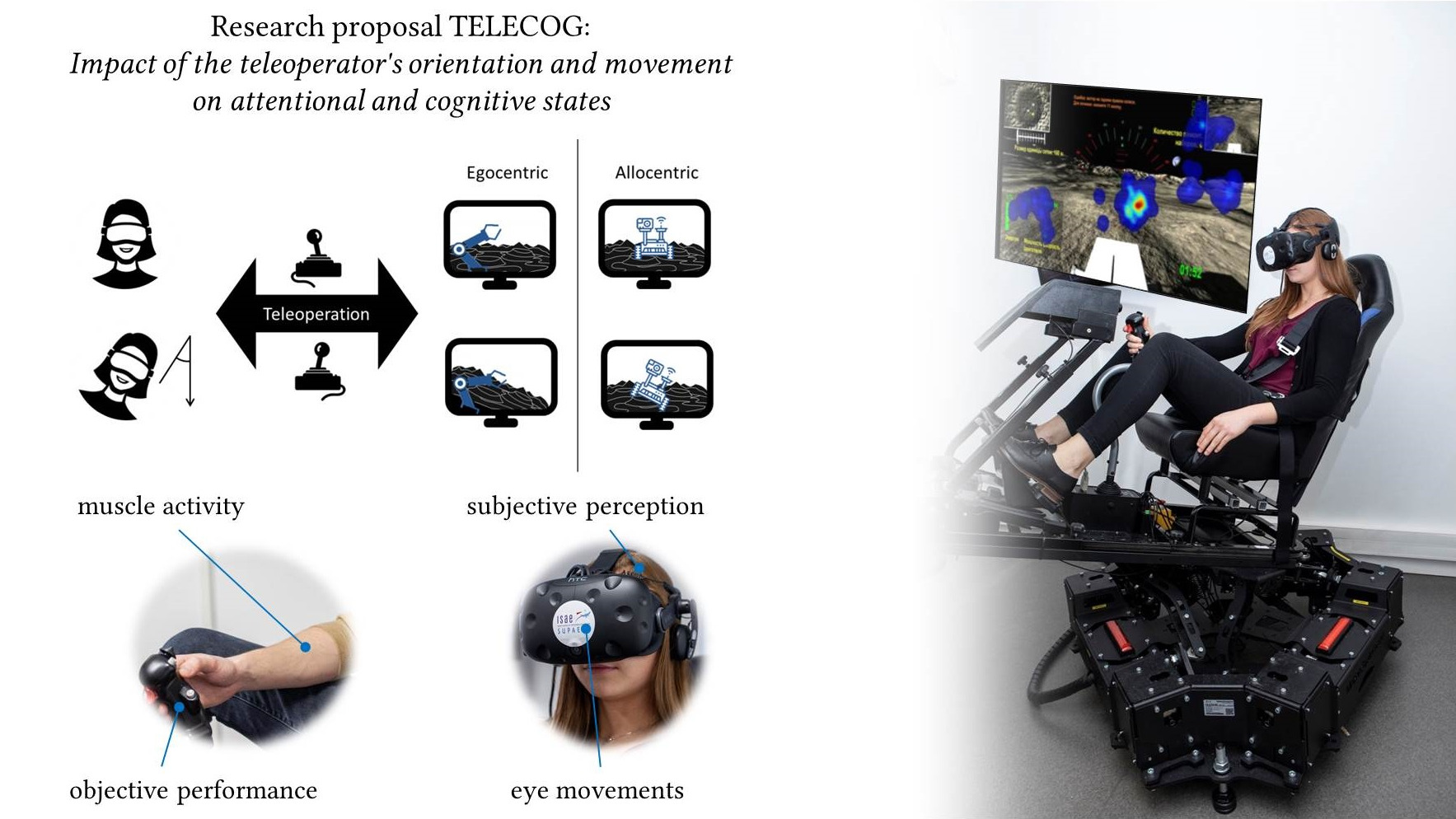
This research project aims to evaluate the effect of body orientation and the direction of the movement of a teleoperator on her/his perception of the tele-operated object and the quality of her/his control. At the end of the research project, guidelines for the design of human-robot interfaces avoiding spatial disorientation will be developed.
We propose two experimental blocks:
- Fundamental block: 3 laboratory experiments under controlled conditions to evaluate the impact of orientation (Exp I), movement (Exp II), and the interaction between orientation and movement (Exp III). We will use a motion platform to induce precise angles of inclination and translations/rotations. We will collect subjective and objective data (subjective perception, response time, accuracy, eye movements, and muscular activity of the hand controlling the robot).
- Ecological block: in this one the operator will be studied under more realistic conditions, analyzing, in particular, her/his behavior during analog space missions (Exp IV, SIRIUS project at IMBP, Russia) and in situations of altered gravity i.e. hypo- and hyper-gravity (Exp V and Exp VI, 0g flight, and short-arm centrifuge).