Duration: 6 months
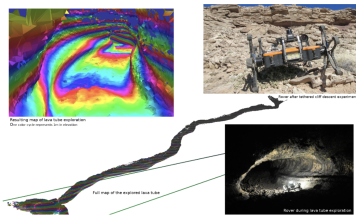
This study addresses an overall solution to access and map a lunar lava tube with a semi-autonomous rover. The study will further improve the existing results from previous projects, where parts of the proposed approach were evaluated e.g. by mapping a lava tube on Tenerife and other field trials [1,2,3]. The lave tube access is performed with a tether system providing communication and energy. When the bottom is reached, the tether spool is deployed and serves as a recharging station and communications relay for the battery-operated rover. After successful deploy, the highly mobile rover can either be remote controlled or enter an autonomous exploration mode. In cases of communication loss, safe navigation inside the tube is achieved through an autonomous exploration algorithm, relying on an integrated SLAM and onboard validation features. The autonomous exploration mode allows the mission to take place more efficiently: The rover can explore new areas without humans in the loop and only connect back to the tether when the power supply is needed for recharging [1,2,3,4]. Autonomous operations are particularly demanding in terms of safety but in such scenario unavoidable: Communication breaks may occur every time due to boulders or other rock structures, so the robot must be able to autonomously return to a position which provides communication. Additionally, the robot may place communication relays, which also serve as artificial landmarks to improve the mapping approach. To increase the safety level, planned paths can be pre-simulated and its performance evaluated before actual execution [5]. This validation step is useful to find the safest paths and to identify the most suitable navigation modes (e.g. speed, maximum level of inclination). This approach can be applied to the autonomous operation without communication (internal simulation) as well as for remote operations (simulation on control station).