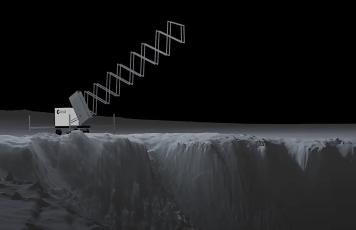
The proposed system is based on a surface unit equipped with a solar panel large enough to supply energy to the surface unit itself as well as to charge the batteries of the robots that are operating inside the cave. The power link between the surface and the cave is achieved by a combination of deployed cables and wireless power transfer. This transference is not intended to overcome the 50-m depth the cave may have. The surface unit is equipped with a crane that allows it to deploy a charging head inside the cave. Given the irregularities the cave floor may present, wireless charging techniques seem to be the most suitable ones when a swarm of small robots, rather than a single bulky one, is operating inside the cave because a perfect alignment is not required between physical terminals, distances of a few centimeters may be overcome and, also, several robots can be charged at the same time. The charging head may deploy the charging coils in several different ways. Nonetheless, considering that the system is aiming at a swarm of robots, a horizontal net suspended over the floor of the cave and with several charging coils is an advantageous structure. The same net configuration but deployed onto the floor presents the same advantages. The proposed structure can be easily equipped with additional elements to provide the data transmission from cave to surface. An additional feature is the possibility of deploying a charging rover. Its payload is just a set of big batteries and a power interface. This rover would charge these batteries in the way proposed using the charging head. Once charged, it can approach other rovers far from the charging head and proceed to charge them using these big batteries. In this way, the rovers do not have to stop their scientific experiments in order to return to the charging head, maximizing the operation time.